Main Objective: Develop Cotton Harvest End-effector for Smart Utility Rover.
Motivation
Cotton harvesting machinery is over ~$1M, making it increasingly difficult for small and mid-sized farmers to afford.
A single harvest at the end of the season exposes early-opening bolls to the risk of deteriorating and falling off of plants, due to extreme weather events and long-term exposure.
Proposed Solution
A system that uses small harvest robots through the season to harvest is:
Scalable by number of bots needed for specific acreage
Cheaper for smaller farmers
Flexible, as the system can be developed to harvest plant 2x or more
Protective against extreme weather events and long-term exposure
Results to Date
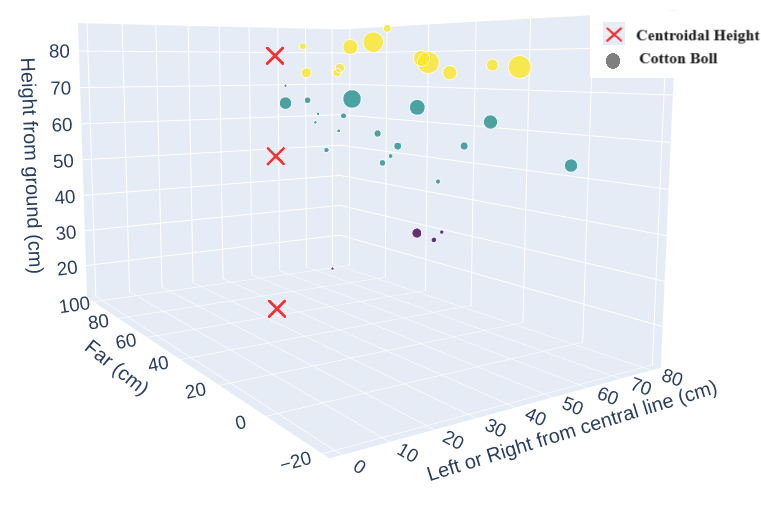
We have tested a prototype of a cotton harvest end-effector that uses machine vision to target open bolls and adjust the height using a Cartesian Robotic Arm Assembly. Figure 1 shows how using a machine-learning (ML) algorithm is creating cotton bolls detected in 3D space to determine the end-effector height while harvesting. Figure 2 illustrates the boll detection algorithm seeing bolls, identifying their position and adjusting end-effector height in real-time.
Test results indicate approximately 56% picking ratio (picked bolls/total bolls) and 3 seconds per boll picked from one side of plant.
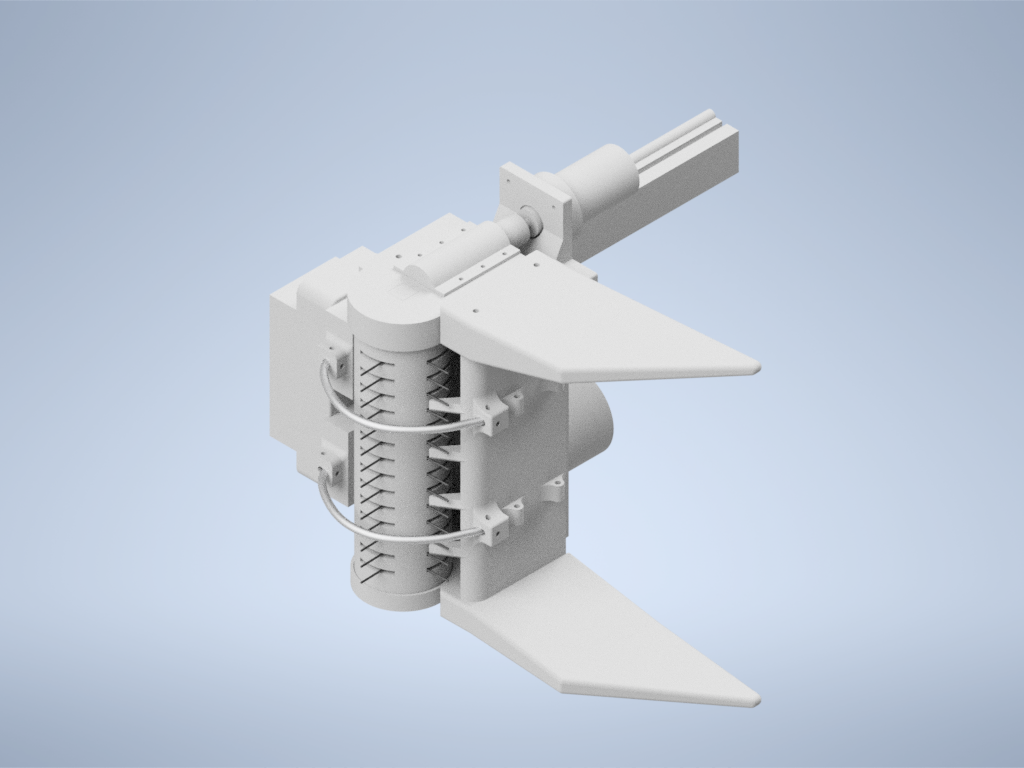
During 2024 harvest season, we will update the end-effctorfor more robust removal of bolls, add a second end-effector to harvest both sides of a row, and employ the new system on a new platform purchased from Farm-ng and customized for testing in cotton. Figure 4 illustrates the platform with cotton harvest end-effectors.
Figure 4: Smart Cotton Harvest Platform with Cotton Harvest End-Effectors
Citation
Thapa, S., Rains, G. C., Porter, W. M., Lu, G., Wang, X., Mwitta, C., & Virk, S. S. (2024). Robotic Multi-Boll Cotton Harvester System Integration and Performance Evaluation. AgriEngineering, 6(1), 803–822. https://doi.org/10.3390/AGRIENGINEERING6010046/S1
Discover more from 4D Farm
Subscribe to get the latest posts sent to your email.


{kind=link}
{kind=link}
{kind=link}